IndustrialMind — IoT 设备故障预测与健康管理
面向工业现场的轴承故障诊断系统,基于深度学习的跨域迁移学习,从算法研究到工程落地的完整链路。
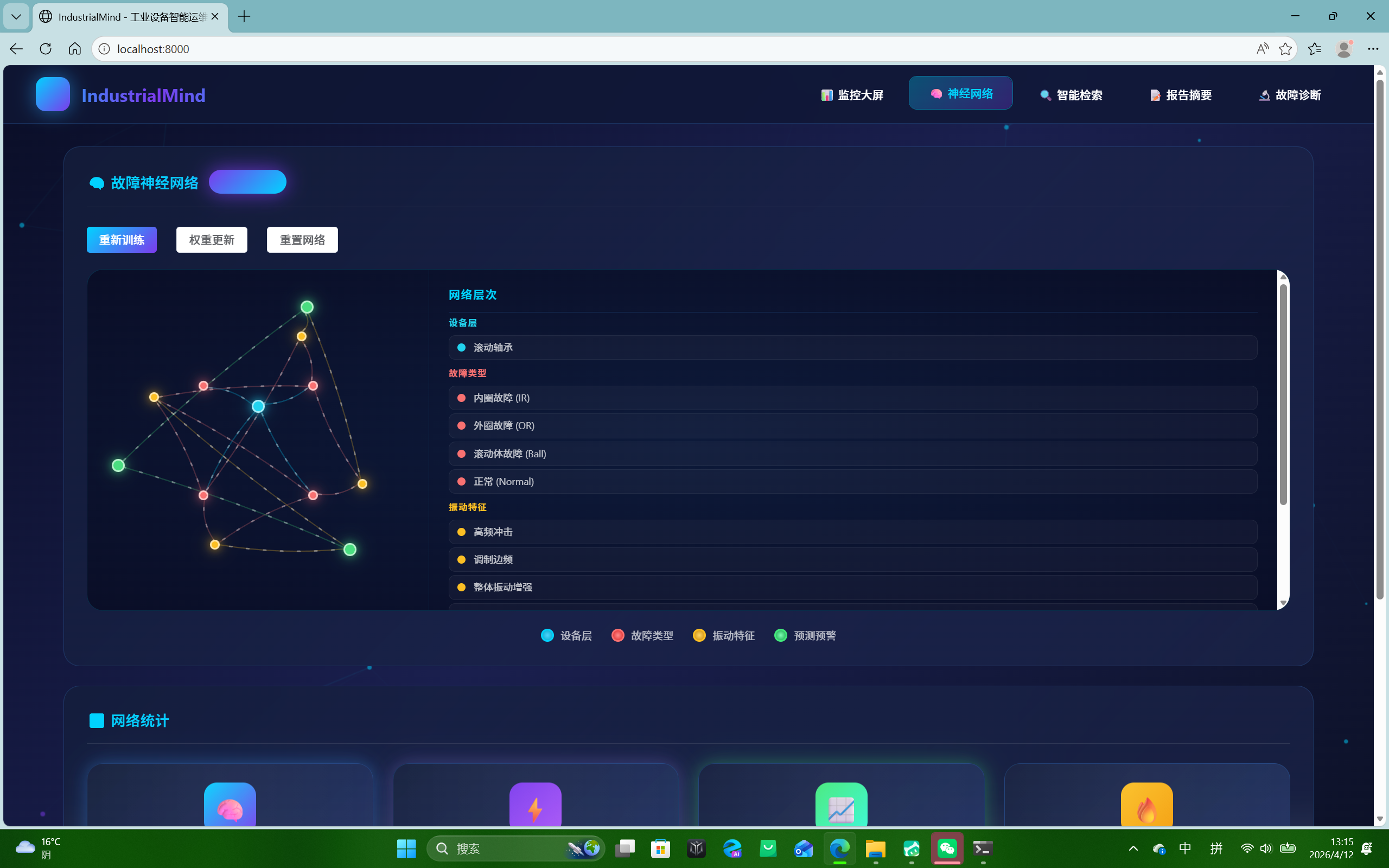
系统截图

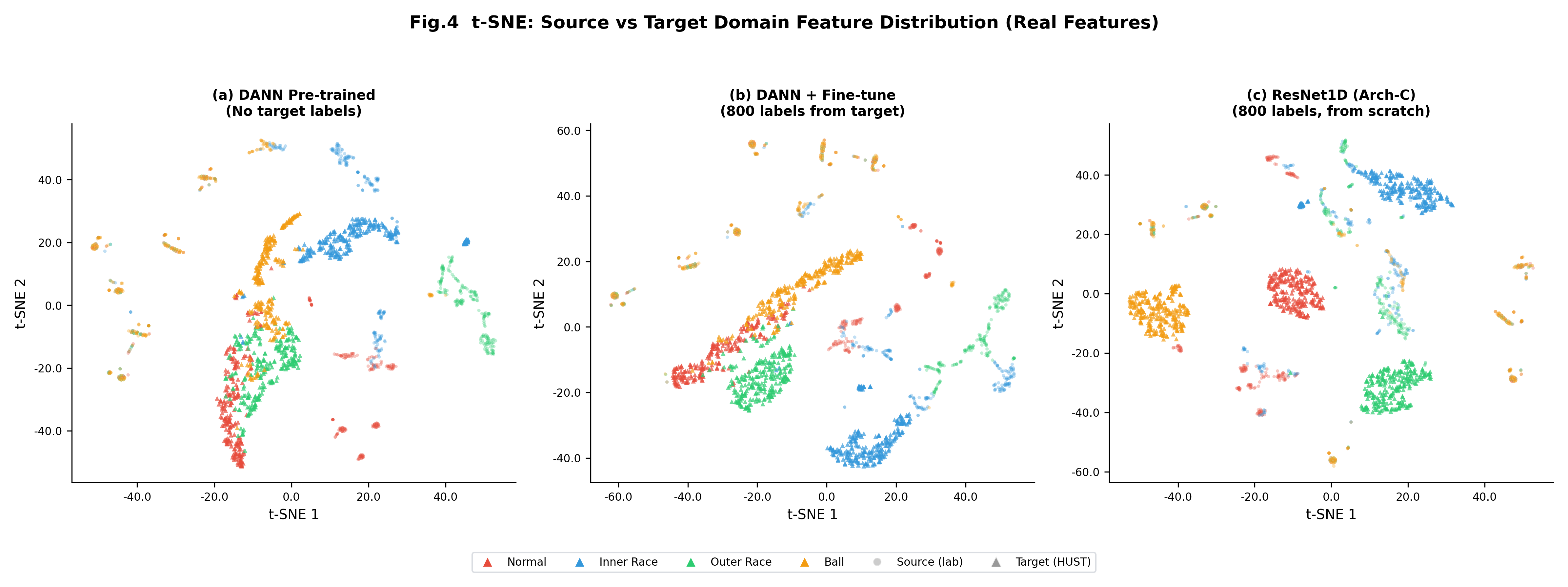
t-SNE 可视化:(a) DANN 预训练后源/目标域特征混在一起 → (b) 微调后开始分离 → (c) ResNet1D 从零训练实现完美聚类
问题背景:跨域迁移的核心挑战
工业场景下,不同设备的振动信号来自不同的采集硬件、采样频率、工况条件。在 CWRU→HUST 轴承故障诊断任务中,源域(CWRU)和目标域(HUST)的信号分布存在显著差异——标准 DANN(Domain Adversarial Neural Network)无监督方法仅能达到 41.54% 的准确率,甚至低于随机猜测水平(25%)的两倍。核心原因在于:GRL(Gradient Reversal Layer)只能对齐边缘分布 P(X),但无法修正标签偏移导致的条件分布差异 P(Y|X)——CWRU 数据集外圈故障占比高达 56%,而 HUST 测试集四类均匀分布(各 25%)。
技术方案:差异架构集成
经过系统性实验,发现同构 Bagging(5 个相同 CNN 软投票)仅提升到 88.18%,方差极低说明模型多样性不足。关键决策:换用 3 种不同容量的架构进行异构集成:
| 架构 | 参数量 | 单模型精度 | 定位 |
|---|---|---|---|
| ResNet1D | 3.9M | 99.78% | 大容量,残差连接 |
| DANN-CNN | 82K | 95.91%(微调) | 小容量,预训练基线 |
| MultiScale-CNN | 27K | 71.86% | 多尺度互补 |
最终三架构软投票达到 99.22%(独立三分离测试集验证:800 标注样本 / 9200 开发集 / 36800 测试集)。核心发现:"大模型从零训练"比"小模型微调"更有效——即使只有 800 个标注样本,ResNet1D 的架构优势远超 DANN 微调的预训练权重。
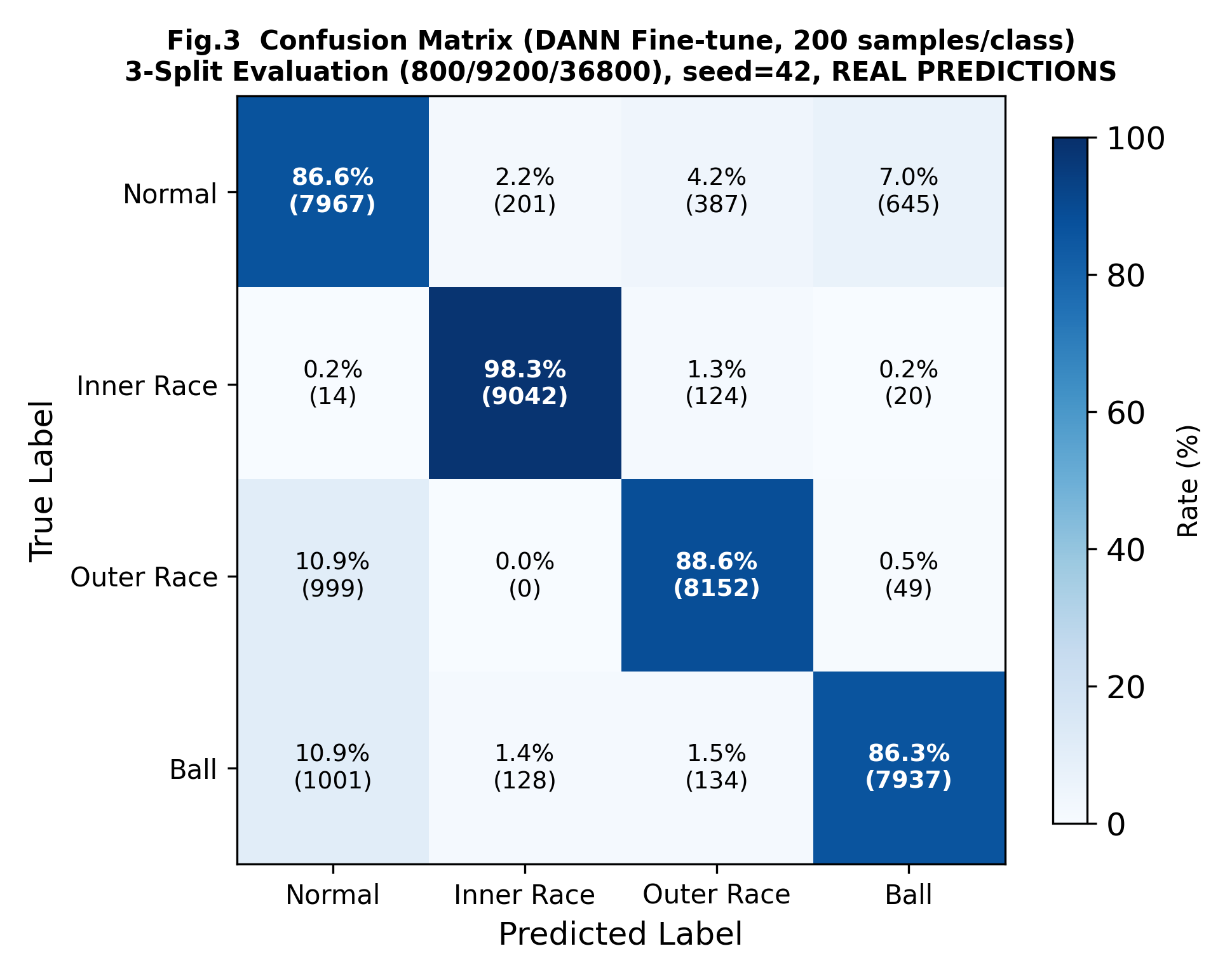
DANN Fine-tune 模型的混淆矩阵(200 样本/类,三分离评估)— 对角线 86%~98% 召回率验证了分类的可靠性
实验体系:4 种域适应方法横向对比
在同一个三分离数据划分下,系统地验证了不同方法的实际效果:
- 标准 DANN 无监督:41.54% —— GRL 达到对抗均衡(Loss≈0.693),但无法解决标签分布偏移
- CDAN 条件对抗:44.23% —— 用 f⊗softmax(p) 作为判别器输入,比 DANN 仅提升 2.7pp
- 线性探针(冻结特征):86.81% —— DANN 预训练特征有判别力,但冻结层限制了适配能力
- DANN 微调(800 标注):95.91% —— 少量标注让预训练权重有效适配目标任务
结论:域适应算法在跨设备场景下的天花板有限,架构选择比域适应策略更重要。
工程化落地
将研究成果转化为可部署产品,完整链路覆盖:
- 后端:FastAPI 单例模式封装 ML 模型(全局加载一次、多 worker 共享),支持 GPU/CPU 自适应推理
- 信号处理:4096 点原始振动信号自动切分滑动窗口,实时提取时频域特征(RMS / 峰值 / 波形因子 / 冲击因子)
- 前端:Vue3 实时展示诊断结果和置信度,包含神经网络可视化监控面板
- 边缘部署:STM32 端预留接口,支持嵌入式边缘推理
技术栈
关键决策记录(ADR)
- 同构 Bagging 无效:5 个相同 CNN 软投票仅 88.18%(方差极低),必须用差异架构引入真正的模型多样性
- Paderborn 数据集陷阱:官方 PDF 确认 KB=复合故障而非滚动体,排除复合故障样本后 v2 微调精度提升 12pp
- CDAN 预训练反而拖后腿:epoch 4 早停导致 Arch-A 微调精度从 95.91% 降到 93.31%
- 标签映射必须查官方文档:CSDN 博客猜测的 KB 含义是错误的,只有 PDF Fact Sheet 才是权威来源